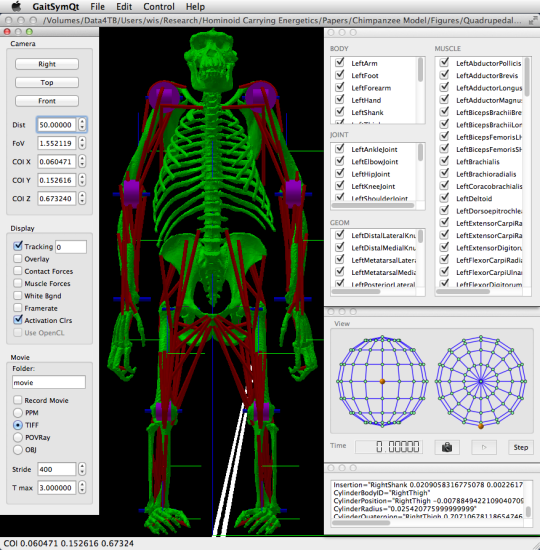
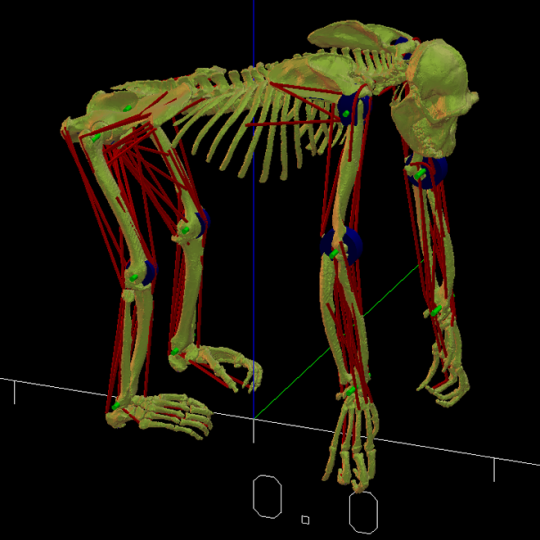
GaitSym er en fremad dynamisk modellering program. Det betyder, at du angiver de kræfter og programmet bruger Newtons love til at beregne bevægelser. Du kan downloade det fra her, herunder en række humane og ikke-humane 2D- og 3D-modeller til at få dig i gang. Det bruger Open Dynamics Engine fysikmotor at gøre det meste af det hårde arbejde og giver et filformat og display system, så brugeren ikke behøver at gøre noget programmering. Det giver også forskellige muskelgrupper modeller, så at de kræfter kan genereres direkte fra muskel aktivering niveauer og et antal kroge til at gøre det muligt at blive anvendt med globale optimering værktøjer såsom genetiske algoritmer. Dens vigtigste funktioner er: Hurtig, fleksibel og robust Forward Dynamic Modeller; Sofistikeret Kontakt System; Minetti-Alexander og Umberger-Gerritsen-Martin Muscle Modeller for Metabolic Cost Estimation; Via-punkter og Cylinder Indpakning til Muscle Paths; Inertitensoren Beregnet ud fra trekantede Mesh Outline; World eller lokal koordinatsystemer til effektiv Model Creation. Fuld kildekode Inkluderet (C ++ kompilerer på MacOSX, Windows, Linux og andre Unix-systemer); Komplet med en lang række menneskelige og ikke-menneskelige 2D og 3D-modeller; Producerer High Quality Stills og animationer via ekstern Ray-tracing
Hvad er nyt i denne udgivelse:.
- Ny slider joint
- Ny muskel model herunder sene dæmpning, aktivering kinetik, ikke-lineær fjeder respons og bedre numerisk stabilitet
- Ny box bilister
- Ny box GEOM
- Ny muskel rem, der kan vikle rundt to parallelle cylindre
- Direkte punkt cloud visualisering
- Afbryd på overdreven hængsel fælles grænseværdier momenter eller på måldata tærskler
- Tracking position kan modregnes at centralisere sporede simuleringer

Kommentarer ikke fundet